 International
International Singapore
Singapore Malaysia
Malaysia Thailand
Thailand Vietnam
VietnamYour shopping cart is empty!

Use Buzzer with Nvidia Jetson Orin Nano GPIO
- Huck Phin Ch’ng
- 25 Jul 2024
- Tutorial
- 268
Introduction
The NVIDIA Jetson Orin Nano Developer Kit carrier boards include a 40-pin expansion header (UART, SPI, I2S, I2C, GPIO). Much like an Arduino or Raspberry Pi, the GPIO pins can be used to buzz a buzzer.
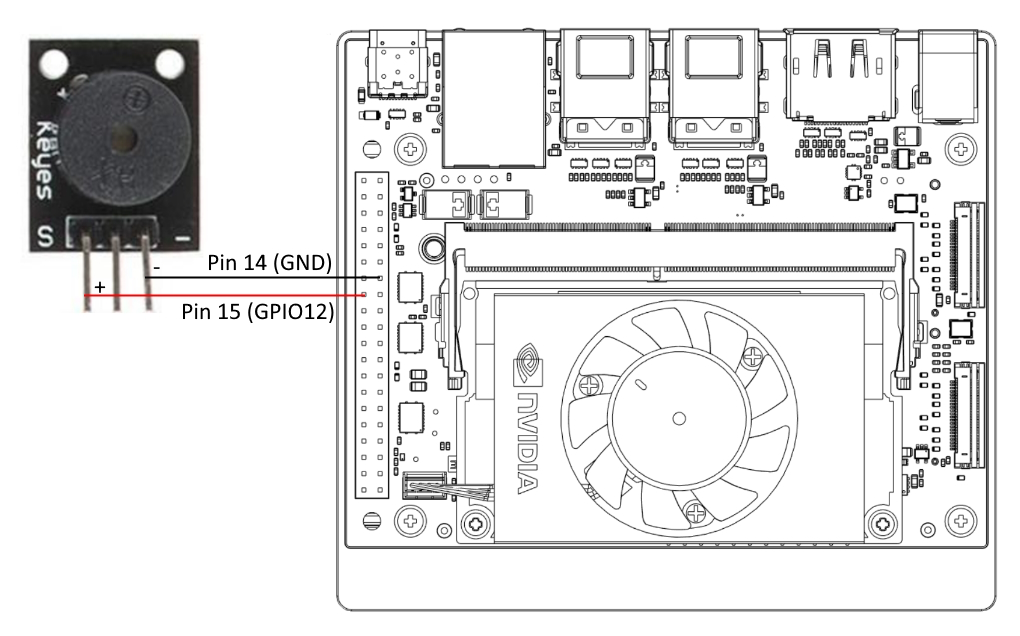
Hardware
Connect the positive leg of your passive buzzer to the 7th pin on the Nvidia Jetson Orin Nano.
Connect the negative leg to a GND (ground) pin on the Nvidia Jetson Orin Nano such as the 6th pin.
Software
Turn on your NVIDIA Jetson Orin Nano, open a new terminal window and first check that Jetson.GPIO is installed
sudo pip install Jetson.GPIO
It should say Requirement already satisfied: Jetson.GPIO in …

Create a new Python file named buzz_buzzer.py
touch buzz_buzzer.py
Now let’s edit the buzz_buzzer.py file
gedit buzz_buzzer.py
For the start, we are going to import the necessary libraries needed
import Jetson.GPIO as GPIO
import time
Then we declare which PIN the LED is connected to
buzzer_pin = 15
We then set to GPIO to use the physical pin number and for the pin to output
GPIO.setmode(GPIO.BOARD)
GPIO.setup(buzzer_pin, GPIO.OUT, initial=GPIO.LOW)
We are going to define a function called beep(). A passive buzzer requires a rapid pulse signal. We can accomplish this by switching between sending HIGH and LOW signals with a very, very small delay in between
def beep():
for i in range(10):
GPIO.output(buzzer_pin, GPIO.HIGH)
time.sleep(0.0005)
GPIO.output(buzzer_pin, GPIO.LOW)
time.sleep(0.0005)
Then start a try-except block. Inside the try block, we will use a while statement. Inside the while statement, the code will repeatedly execute. So here we repeatedly call our beep function and wait for another 500 milliseconds.
try:
while True:
beep()
time.sleep(0.5)
Lastly, finish the try-except block with the except block specifying KeyboardInterrupt. This block will make our program safely close when we want to close the program.
except KeyboardInterrupt:
print("Exiting gracefully")
GPIO.cleanup()
The completed code should look like this:
import Jetson.GPIO as GPIO
import time
buzzer_pin = 15
GPIO.setmode(GPIO.BOARD)
GPIO.setup(buzzer_pin, GPIO.OUT,initial=GPIO.LOW)
def beep():
for i in range(10):
GPIO.output(buzzer_pin, GPIO.HIGH)
time.sleep(0.0005)
GPIO.output(buzzer_pin, GPIO.LOW)
time.sleep(0.0005)
try:
while True:
beep()
time.sleep(0.5)
except KeyboardInterrupt:
print("Exiting gracefully")
GPIO.cleanup()
Click on the Save button to save the code and then close gedit (the text editor program)

We can now launch the buzz_buzzer.py program
python3 buzz_buzzer.py
When you are finished, you can press Ctrl + C to safely stop the program
Hardware Components

NVIDIA Jetson Orin Nano 8GB Dev Kit
RM2,550.00
x 1 unit(s)
 -8%
-8%Nvidia Jetson Orin Nano Training Kit - AI Compu...
RM3,249.00 RM3,500.00
x 1 unit(s)